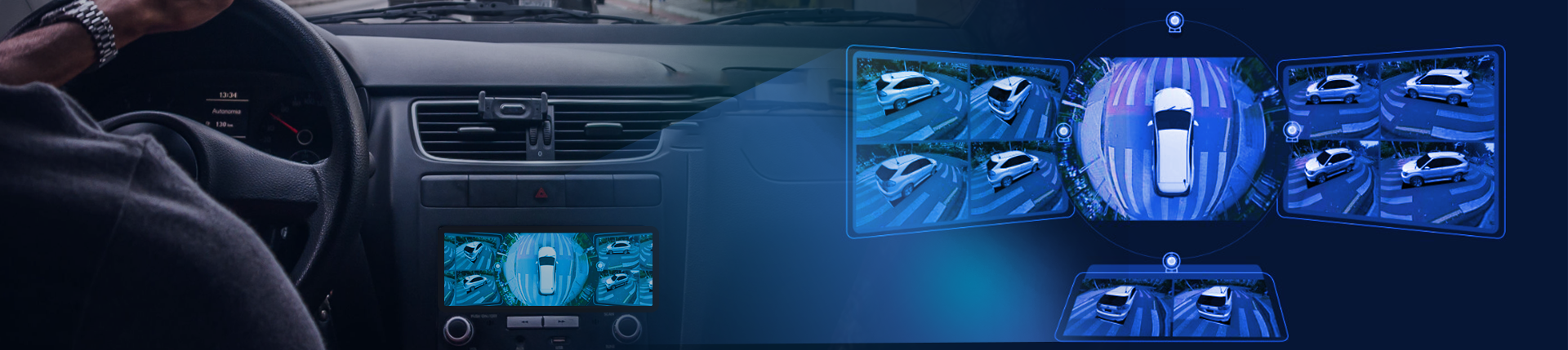

Video Stitching is among the most researched subjects in computer vision and illustrations. Recently, video stitching algorithms are being applied in numerous fields and perhaps the most energizing highlight of the video stitching applications is the automotive space. Automotive companies have also begun bringing video stitching in surround view monitoring systems from their luxury segment to their mid-priced segments. Hence, due to the popularity and the expanding awareness around multi-camera advancements, the automotive camera market is expected to grow at a CAGR of 12.4% reaching USD 12.2 billion by 2025 (report by marketsandmarkets). A properly implemented surround view system can give you two types of views:
- Panoramic view,
- 360-degree surround views or Bird’s eye view
A typical surround view system consists of 4 fish-eye cameras, each having >180 field-of-view (FOV), mounted on the front, back, and sides of the vehicle. The video feeds from the four cameras are stitched together using a video processing unit. This framework gives users real-time visibility of the immediate vicinity of the vehicle. The advancement of the surround view systems for vehicles is helpful in;
- Parking Assist
- Obstacle Detection
- ADAS Implementation, and much more
Table of Contents
The Technology Behind Video Stitching in the Automotive Industry
Video stitching technology is getting advanced and more complex. Even the OEM’s are actively looking for the right experts and partners who can help them in implementing the video stitching technology with supported algorithms and accelerated time to market. In a typical video stitching process, there are four major steps involved;
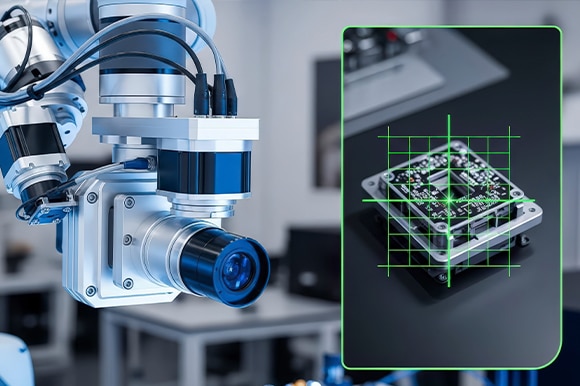
- Camera Calibration: It is the process of gauging intrinsic and extrinsic parameters. Intrinsic parameters are the camera’s internal characteristics, such as focal length, skewness, image distortion, and image center. Extrinsic parameters are described as the camera’s position and predilection in the world.
- Image Warping: It is a process of manipulating a distorted image digitally in order to correct the shape and size of the objects and project them in the way they are meant to be seen. In this, each pixel of the distorted image is mapped to the approximate pixel in the destination image.
- Video Stitching: The process of constructing a stitching template by stitching the original videos using the image stitching algorithms. A single wide FOV video is generated by stitching the frames and bending them together. Foreground detection is employed to solve the potential blurring and ghosting in the stitched video, i.e, the stitching template is updated when an object moves across the overlapping regions among images.
- Image Tuning: This involves optimizing the ISP (Image Signal Processor) parameters that help to graduate and change the filters for existing image parameters like exposure adjustment, white balance correction, image noise reduction, color interpolation, gamma reduction, tone mapping, lens shading correction and black level adjustment.
With the advancement in the technology for video stitching, the objective is to show what all occurs around the vehicle on the screen in real-time with no blind spots and make driving easy and safe. Hence, along with high megapixel cameras and video color quality, it would also be relevant to consider other factors such as Parallax effect, Frame synchronization, Lens Selection & FOV, Video Latency, and Regulations (like camera placement, minimum view, etc).
Meeting the final objective of getting the perfect view after video stitching is actually a very complex process. Despite using the modern video stitching tools, developers face challenges to remove the parallax error created when blending images from multiple cameras while stitching the video frames. Thanks to Artificial Intelligence, now the developers are literally able to minimize the parallax effect (even under different environmental conditions) to a negligible value using dynamic seam lines technology with AI algorithms and project a near to perfect stitched video on the touch screen monitor in the vehicle.
Why is VVDN the Right Choice?
VVDN’s expertise in camera & vision in the automotive sector provides futuristic camera-based solutions in the domain of surround-view monitoring systems. With our in-house capabilities of image-tuning, video calibration, and our wide range of AI/ML-based video stitching algorithms, we are able to provide one of the best video stitching results in the surround-view systems with zero blind spots. Not only that, our vision team comes with a lot of experience in developing solutions that require implementing parallax tolerant video stitching, quick boot time, dynamic seamline, quick display, and low latency video stitching. With all this, VVDN has successfully been able to provide a Simulation Set up to test the car, on-field testing, and develop its own calibration tool for the vehicle calibration and camera calibration solutions for the tier 1 OEMs.
Click here to read more about VVDN’s camera expertise or for any such requirement feel free to contact: info@vvdntech.com